Hi Readers!
I know I have been away forever… I apologise!
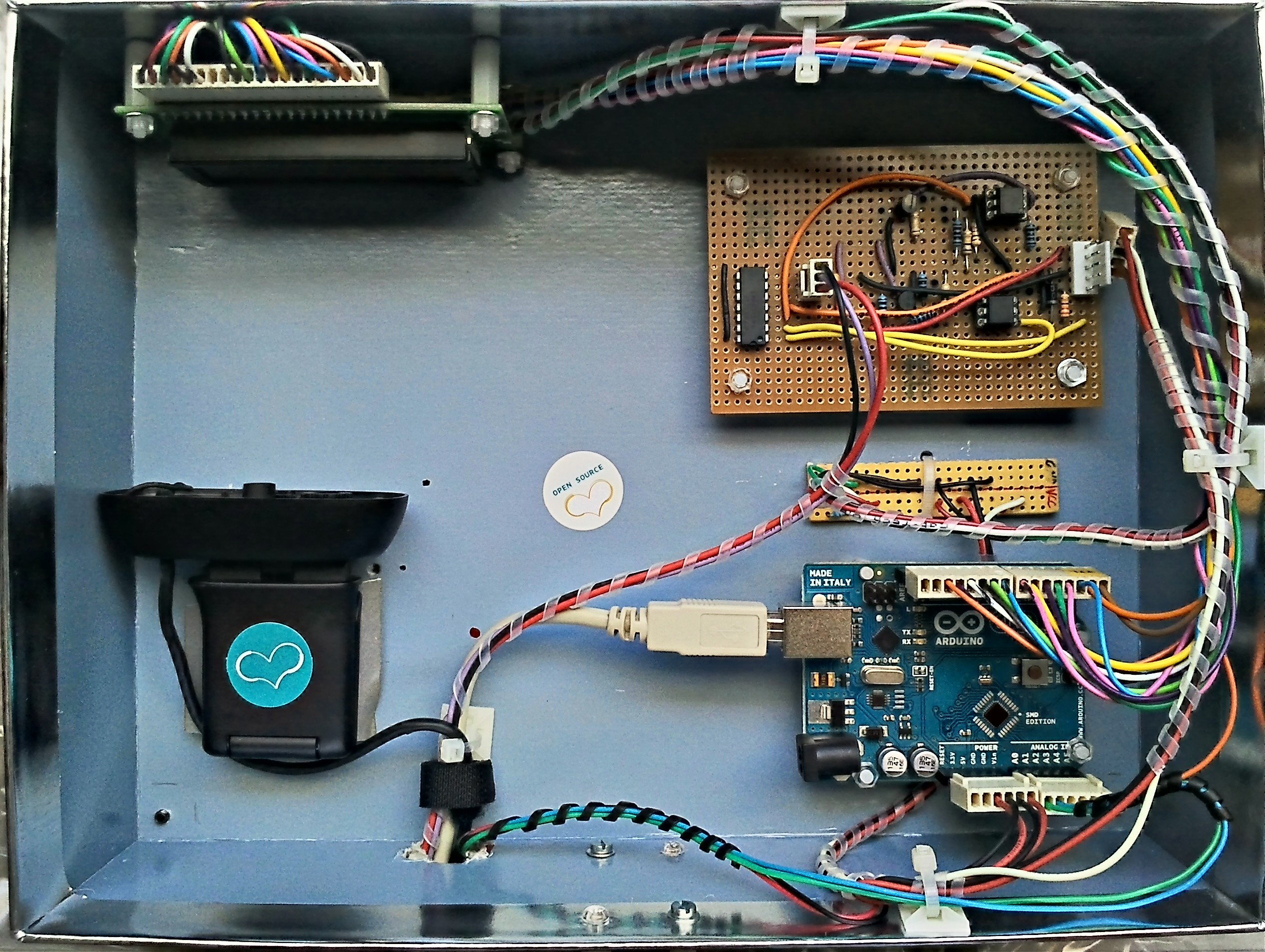
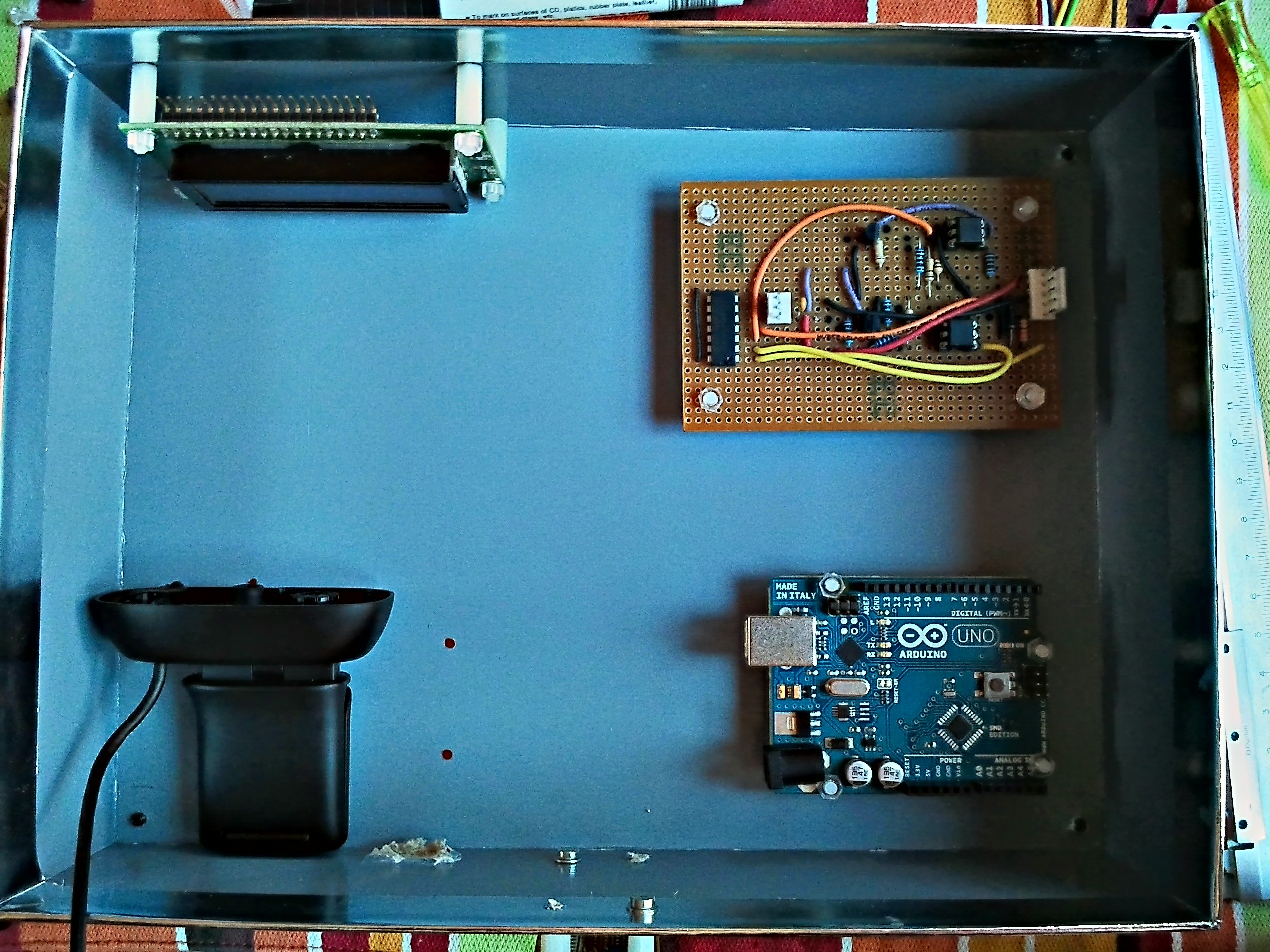
I recently received the L9637D IC, from ST Microelectronics. It is essentially the giant ugly circuit I built, which interfaces with the ECU’s K-line, in one small IC! So cool!
I will be using it soon because the K-line circuit I built is too bulky (and ugly) in comparison.
I still have not purchased a bigger display, however, I have decided to rethink this whole project and my conclusion is that I want to use a different microcontroller to redo the project. The big question is which one, options are PIC and ARM.
I could stay with Arduino (AVR) but I will be working with ARM and PIC development boards this year and I want to expand my knowledge regarding both. I also want to experiment with real-time operating systems.
Oh and before I forget again, my final mark for this project was 76%. I think that is a decent mark.
I hope that was enough of an update? 🙂
I’ll be back soon!